Framework Overview
We present a framework that converts assembly parts design into a detailed joint-based robotic arm trajectory.
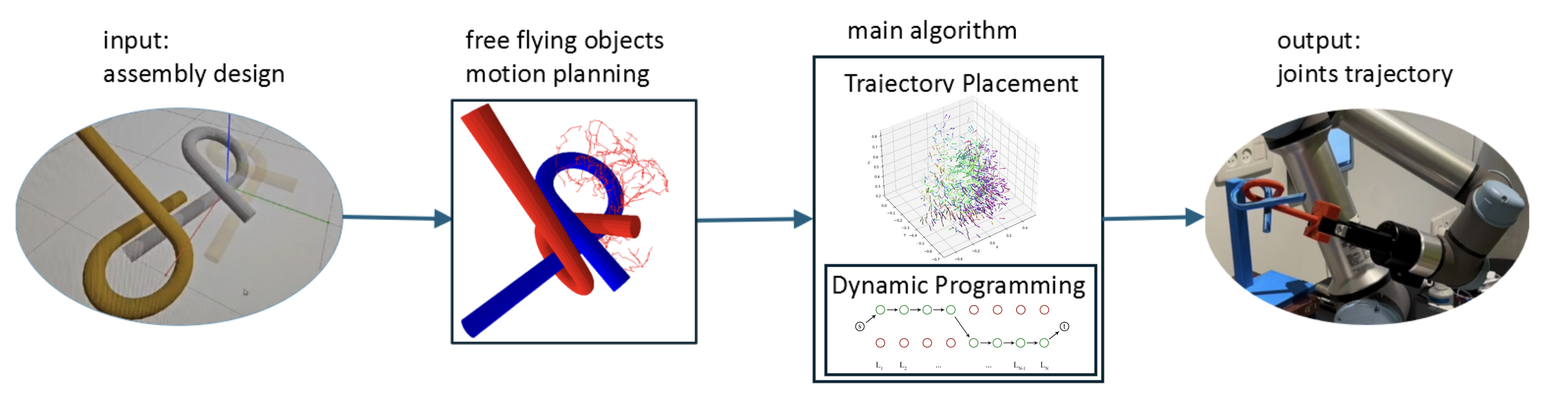
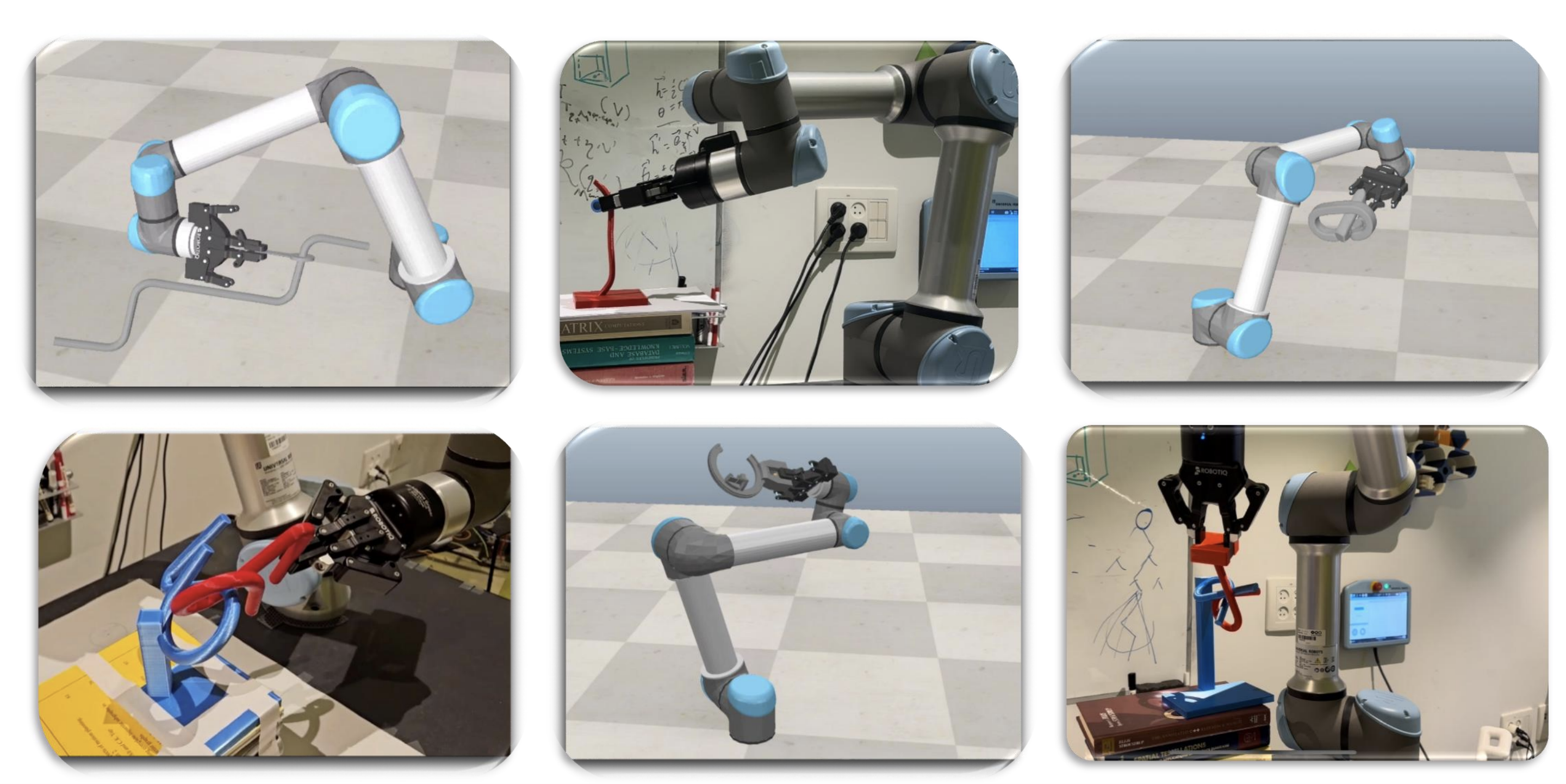
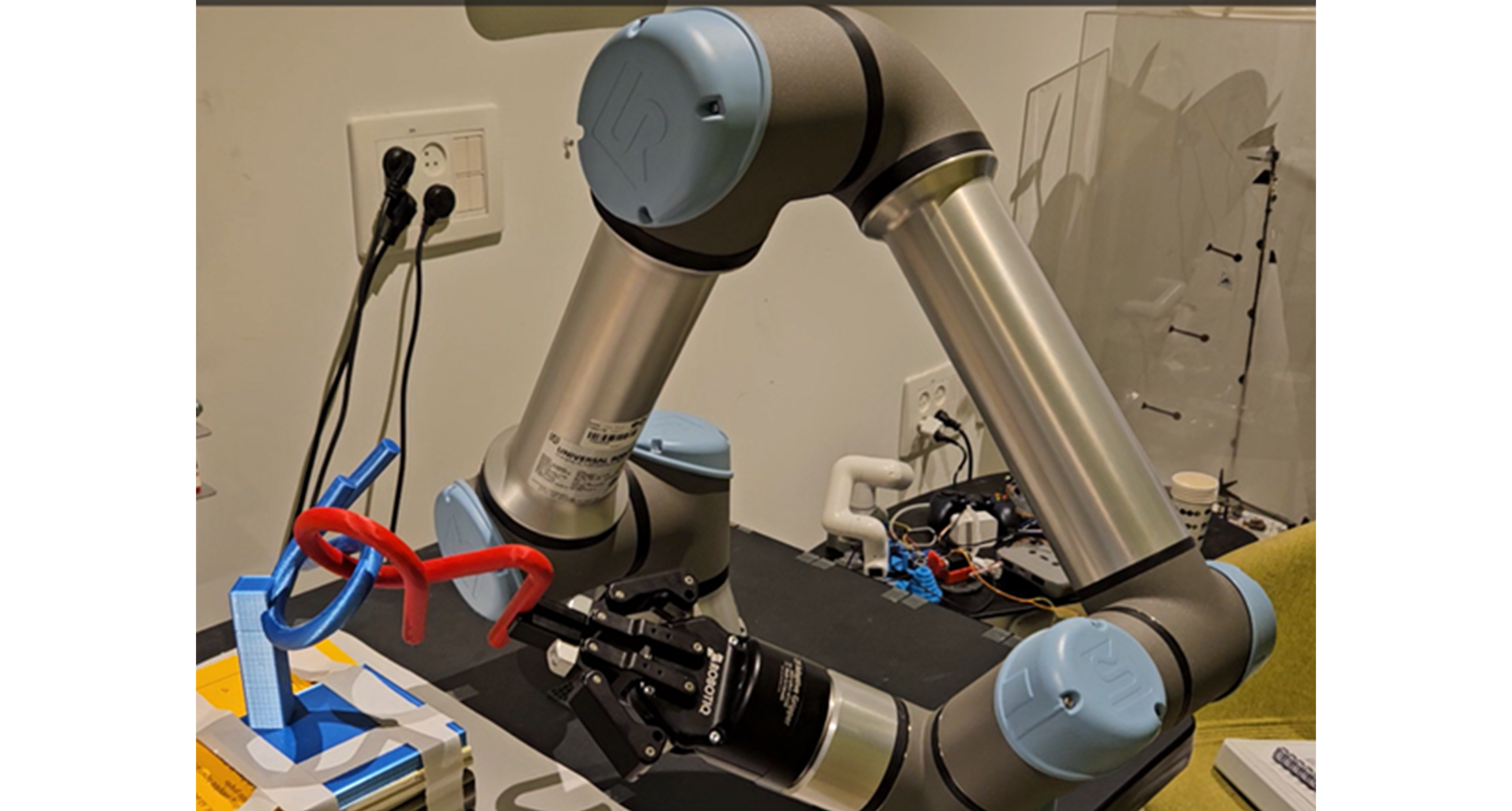
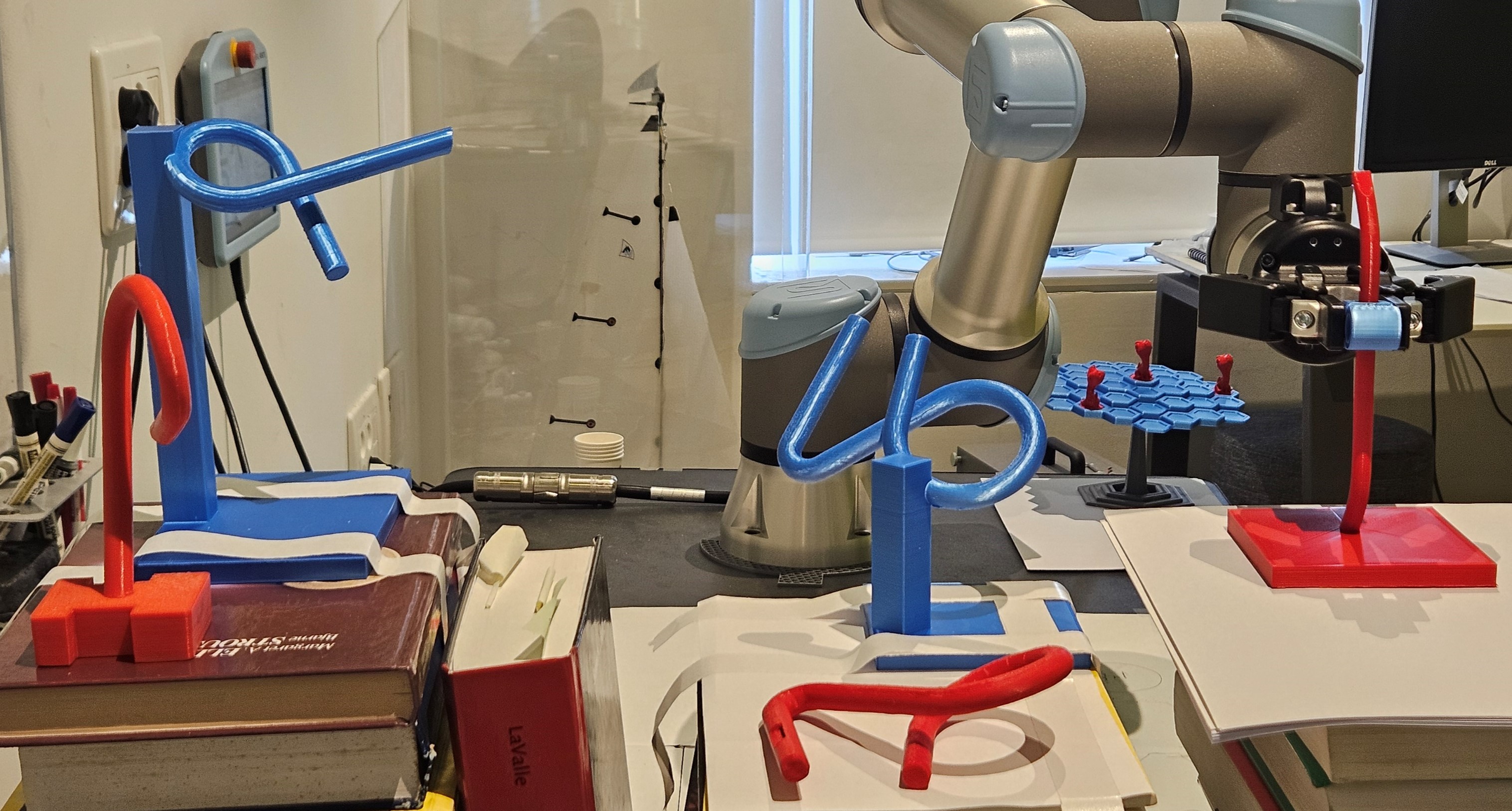
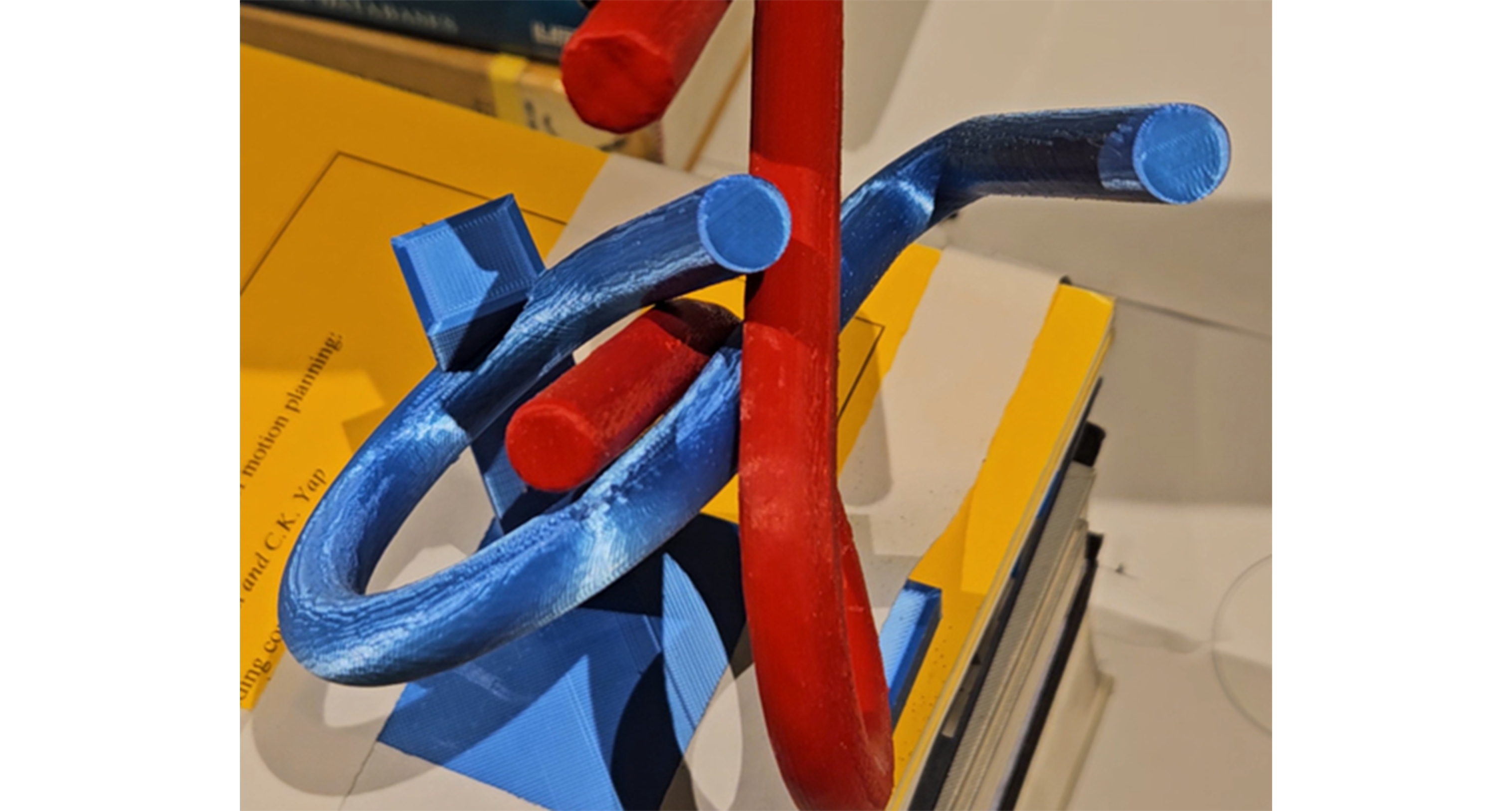
We present an end-to-end framework for planning tight assembly operations, where the input is a set of digital mod- els, and the output is a full execution plan for a physical robotic arm, including the trajectory placement and the grasping. The framework builds on our earlier results on tight assembly plan- ning for free-flying objects and includes the following novel com- ponents: (i) the framework itself together with physical demon- strations, (ii) trajectory placement based on novel dynamic path- wise IK and (iii) post processing of the free-flying paths to relax the tightness and smooth the path. The framework provides guarantees as to the quality of the outcome trajectory. For each component we provide the algorithmic details and a full open- source software package for reproducing the process. Lastly, we demonstrate the framework with tight and challenging assembly problems (as well as puzzles, which are planned to be hard to assemble), using a UR5e robotic arm in the real world and in sim- ulation. See the figure at the top for a physical UR5e assembling the alpha-z puzzle (known to be considerably more complicated to assemble than the celebrated alpha puzzle).
We present a framework that converts assembly parts design into a detailed joint-based robotic arm trajectory.
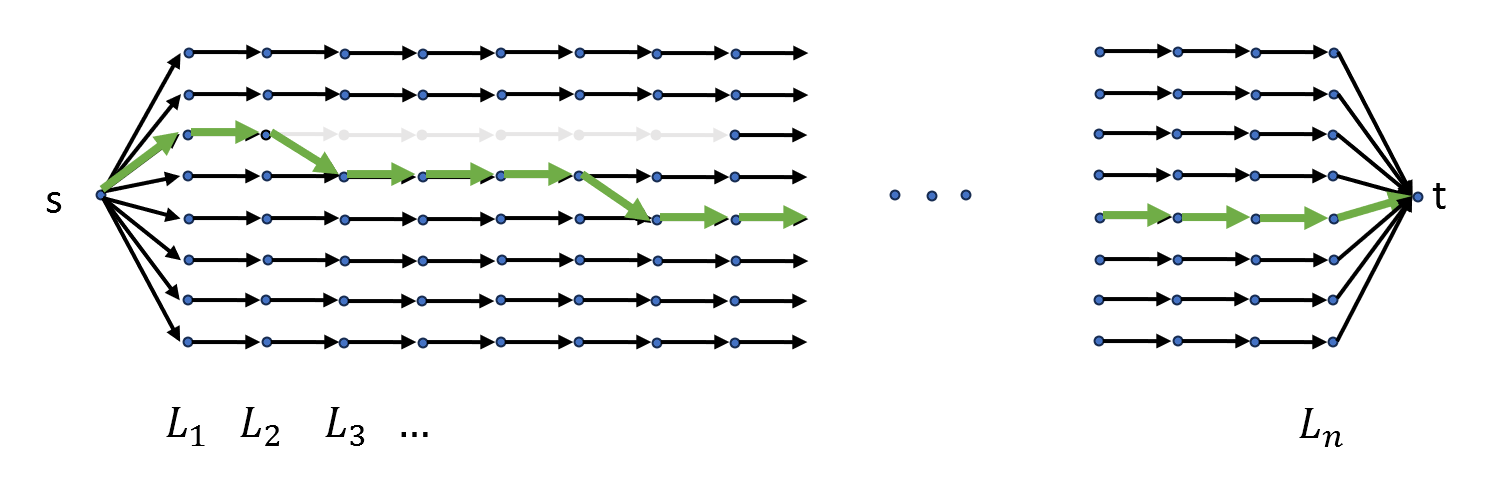
Continuous Path-Wise IK (CPW-IK) is a fast dynamic programming based algorithm, which guarantees to provide only feasible trajectories, with bounded error. We build a layered Directed Acyclic Graph G in joint space, where each layer 𝐿𝑖 represents time stamp 𝑖 in the trajectory, and each row refers to a specific branch of the robotic arm. We then add start and end dummy nodes s and t to the graph. Node 𝑎 ∈ 𝐿𝑘 is connected to node 𝑏 ∈ 𝐿𝑘+1 if and only if their 𝐿1 distance in C-space is smaller than some predefined threshold. Next, we perform a search for a directed path in G from s to t with the minimum maximally-weighted edge.
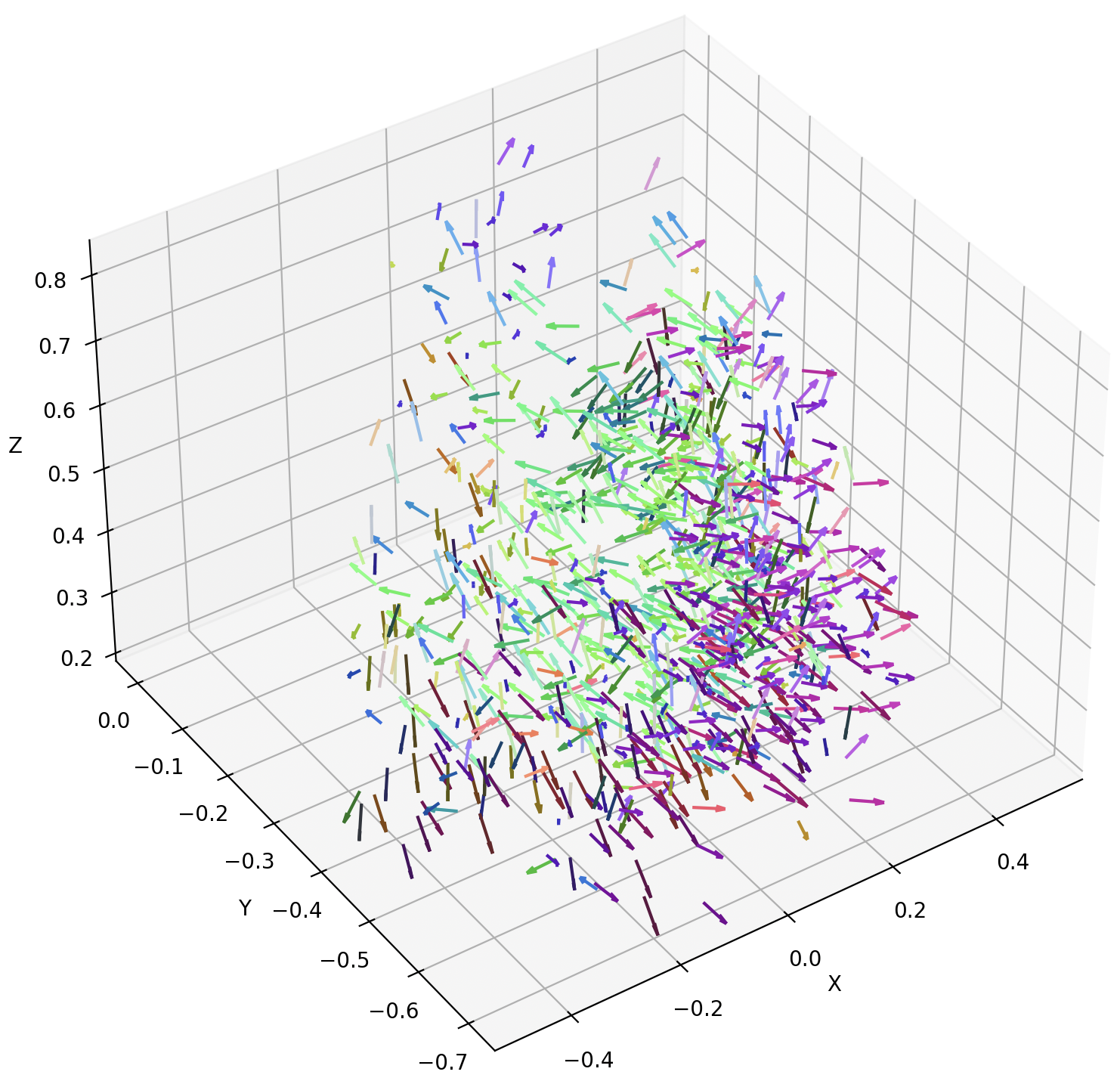
Randomly search for a valid placement of the static part of the assembly, using the fast CPW-IK to test for a valid trajectory of the arm moving the dynamic part. Successful locations are represented below by arrow locations, while the orientation is represented by the arrows direction and color.
Six classic challenging assemblies were solved by the framework, using physical robotic arms and in simulation.